
Gegen Fachkräftemangel
Kollaborativer Roboter
Das Fraunhofer IAPT zeigt auf der Fruit Logistica 2026 einen Roboter mit flexiblem Greifarm. Die Lösung automatisiert die Handhabung unterschiedlicher Früchte und Prozesse wie das Greifen, Sortieren und Konfektionieren. Der kollaborative Roboter kann mit Menschen zusammenarbeiten und den Fachkräftemangel abfedern.
von Fraunhofer IAPT erschienen am 27.01.2026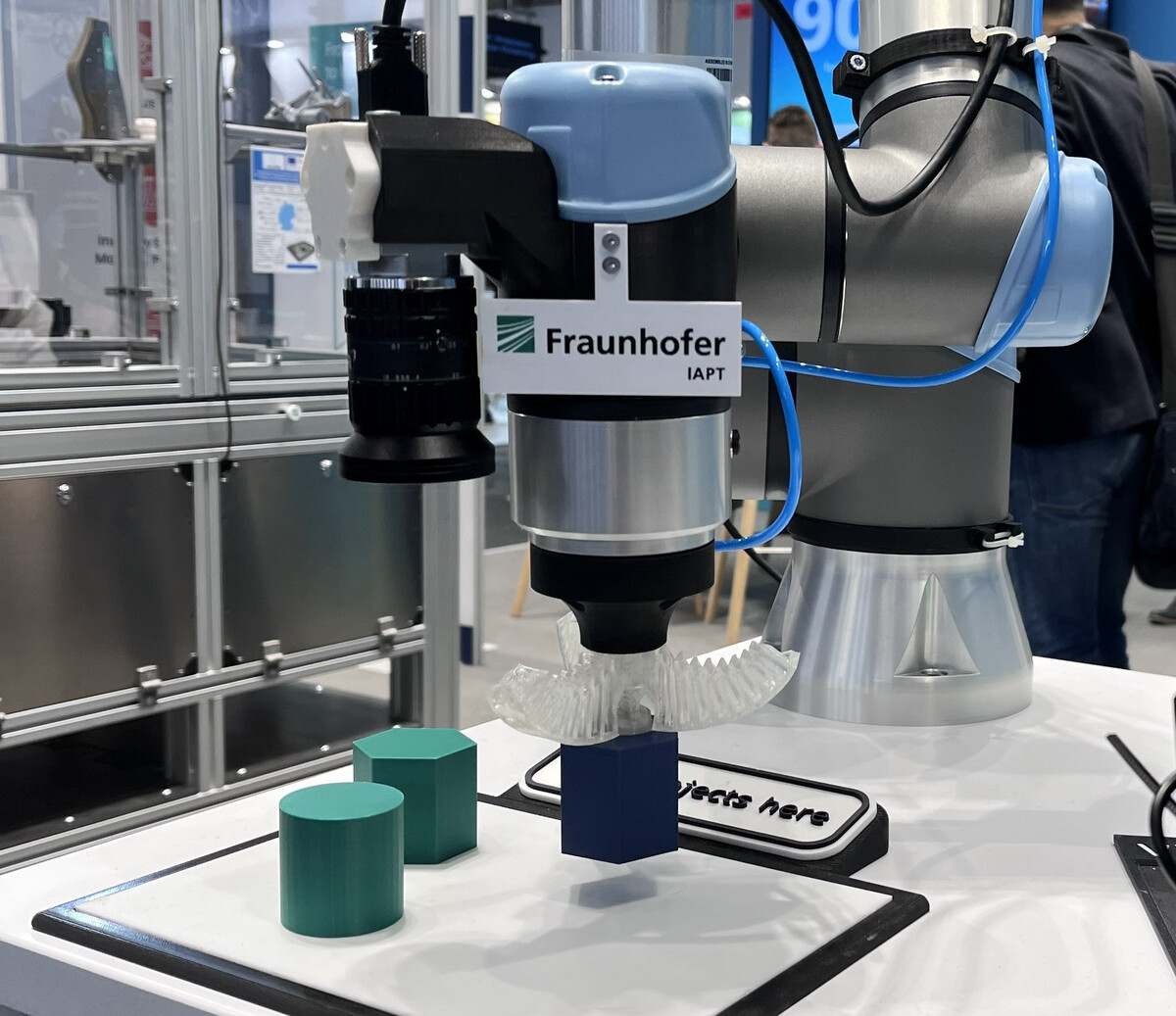
Der kollaborative Roboter mit 3D-gedrucktem Greifer aus Silikon eignet sich ideal für den Umgang mit Obst und kann individuell angepasst werden. Das Bild zeigt eine Vorläufer-Version von der Formnext 2025. © Fraunhofer IAPT
Der kollaborative Roboter des Fraunhofer IAPT ein sogenannter Cobot adressiert den Personalmangel und die körperliche Belastung im Fruchthandel. Der Cobot unterstützt Händler und ihre Mitarbeitenden bei repetitiven oder anstrengenden Aufgaben wie dem Sortieren und Verpacken von Obst. Der Silikongreifer des Cobot und die anspruchsvolle Sensorik verbinden hohe Flexibilität mit zuverlässiger Automation der Arbeitsabläufe und der Einhaltung von Sicherheitsvorgaben.
Sicherheit und Beschleunigung durch intelligente Automation
Das Fraunhofer IAPT hat für den Cobot einen Saug- und Fingergreifer entwickelt und das Bauteil mit Additiver Produktion aus Silikon hergestellt. Das Material des Silikongreifers eignet sich für die automatisierte Handhabung fragiler, druckempfindlicher Obstsorten und erfüllt die Ansprüche der Lebensmittelindustrie. Die Verbindung mehrerer Fertigkeiten wie das Ansaugen und Greifen von Objekten in einem Werkzeug beschleunigt die Abläufe. Ein Austausch des Greifarms für unterschiedliche Arbeitsschritte oder Fruchttypen erübrigt sich.
Die Sensorik des Cobots unterstützt einen adaptiven Greifprozess für unregelmäßige Formen und unterschiedliche Positionen der Früchte. Der Cobot lässt sich für individuelle Anforderungen und Einsatzgebiete mit geeigneter Sensorik von simplen Abstandssensoren bis zu Kamerasystemen ausrüsten. Computer Vision und Künstliche Intelligenz (KI) erkennen Objekte und ihre Position. Sie steuern die Bewegungen des Cobots, beispielsweise für intelligente Reaktionen auf die Form, Größe und Position von Früchten.
Von Einstiegslösungen bis zum Ausbau bestehender Robotersysteme
Das Fraunhofer IAPT unterstützt Unternehmen bei der Identifikation ihrer Anforderungen und der Entwicklung eines geeigneten Automationskonzeptes ebenso wie beim Design und der Additiven Produktion des Greifsystems, der Integration der benötigten Sensorik und der abschließenden Implementierung. Bestehende Robotersysteme ergänzt das Fraunhofer IAPT mit Greifern, die je nach Bedarf in Größe, Anzahl und Form der Finger variieren. Applikationen zur KI-gestützten Bildverarbeitung steigern die Stabilität und Robustheit der Automationssysteme.
Das Fraunhofer IAPT legt den Fokus auf die Flexibilität des Systems. Sowohl der Greifer als auch die eingesetzten Sensoriken zur Objekterkennung orientieren sich an dem individuellen Szenario des Fruchthandels. Einzelne Komponenten oder der gesamte Aufbau können punktuell oder entlang der gesamten Prozesskette eingesetzt werden.
Kostengünstige Antworten auf Herausforderungen
Das Fraunhofer IAPT liefert mit Cobots, Silikongreifern und Sensoriken kostengünstige Antworten auf die Herausforderungen des Fruchthandels - von fehleranfälligen Automationslösungen zu ungedecktem Personalbedarf und körperlicher Überlastung der Mitarbeitenden. Mit jahrzehntelanger Erfahrung aus Forschung und Industrieprojekten zum industriellen Einsatz von Additiver Produktion entwickeln die Teams des Fraunhofer IAPT zuverlässige Automationslösungen mit niedriger Komplexität und leicht zugänglicher Technologie.
Mehr zum Thema:
0 Kommentare











Zu diesem Artikel liegen noch keine Kommentare vor.
Artikel kommentierenSchreiben Sie den ersten Kommentar.