Wettkampf der virtuellen Roboter
Das 18. Internationale Field Robot Event (FRE) wurde in diesem Jahr aufgrund der Pandemie als virtuelle Veranstaltung vom 8. bis 10. Juni 2021 auf der Digitalplattform der DLG (Deutsche Landwirtschafts-Gesellschaft) ausgetragen. 14 Studententeams aus Dänemark, Deutschland, den Niederlanden, Rumänien und Slowenien traten in diesem Jahr mit ihren virtuellen Robotern gegeneinander an. Auch zwei Schüler-Teams nahmen am internationalen digitalen Kräftemessen teil. Über 500 Zuschauer verfolgten an drei Tagen den internationalen Wettbewerb, aus dem das Team Bullseye der Universität Wageningen (Niederlande) als Gesamtsieger hervorging. Eine Aufzeichnung des Wettbewerbs ist in der DLG-Mediathek unter den unten angefügten Links zu sehen.
- Veröffentlicht am

2003 von der Universität Wageningen in den Niederlanden gegründet, wurde der Feldroboter-Wettbewerb in diesem Jahr gemeinsam von den Universitäten Hohenheim und Wageningen durchgeführt. Im Rahmen des Wettbewerbs werden innovative Robotik- und Precision-Farming-Technologien unter realen Bedingungen getestet und jungen Wissenschaftlern die Möglichkeit gegeben, ihre Ideen untereinander auszutauschen und weiterzuentwickeln. Die DLG-Feldtage sind seit 2014 offizieller Partner des Field Robot Event.
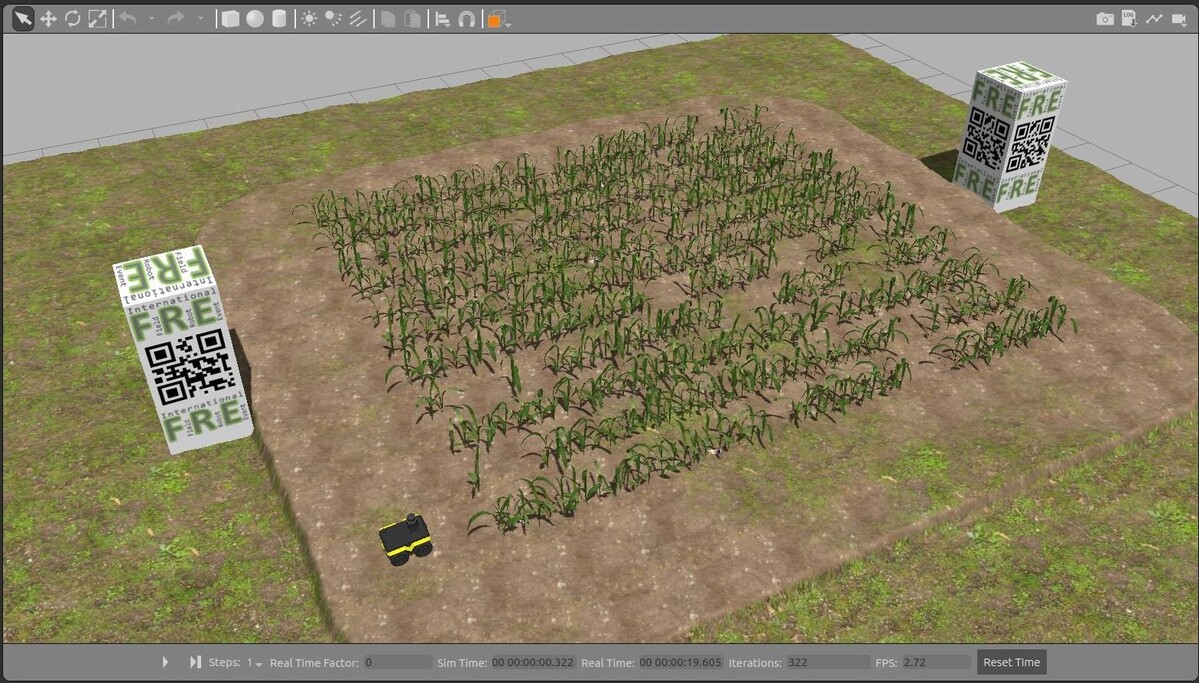
Der jährliche Wettbewerb für Studententeams und ihre Feldroboter wurde in diesem Jahr mit Hilfe einer Simulationsumgebung durchgeführt, wie sie bei der NASA Space Robotics Challenge zum Testen von Robotersoftware für die Weltraumforschung zum Einsatz kommt. Die virtuelle Veranstaltung bot damit den Teilnehmern realistische Designs mit realen Effekten, um eine Reihe von landwirtschaftlichen Feldszenarien nachzustellen.
Gesamtsieger: Team Bullseye der Universität Wageningen
Die Teams und ihre Feldroboter mussten mehrere Pflichtaufgaben lösen. Die Testumgebungen aus modellierten Maisfeldern erhielten die Teilnehmer bereits vor Beginn der Veranstaltung. Die Umgebungen für den Wettbewerb wurden daraus variiert und waren dann anders, aber für alle gleich. Die Roboter mussten über viele Fähigkeiten verfügen, die im Vorfeld als Steuerungsalgorithmen einprogrammiert worden waren: Navigieren entlang gekrümmter Pflanzenreihen, das Erfassen und Unterscheiden von Objekten und das georeferenzierte Kartieren dieser Objekte. Dies erforderte viele Monate Entwicklungsarbeit im Vorfeld. Eine weitere schwierige Aufgabe war das Entfernen von Unkraut und Getränkedosen. Hierfür musste eine genaue Software der Aktoren funktionieren, die die Werkzeuge steuern.
Der Gesamtsieger des Internationalen Field Robot Event wurde das Studententeam Bullseye der Universität Wageningen (Niederlande). Es überzeugte in den gestellten Feldaufgaben zu den Themen Navigation, Objekterkennung und -entfernung. Die Freestyle-Aufgabe, in dem die studentischen Teams ihre Ingenieurskunst bei der Lösung einer landwirtschaftlichen Aufgabe ihrer Wahl unter Beweis stellen mussten, gewann das Team Ceres der Fachhochschule Münster mit seinem Ernteroboter für Kürbisse.
Der Ehrenpreis ging an Kamaro Engineering, ein studentisches Ingenieurteam für innovative Feldroboter des Karlsruher Instituts für Technologie (KIT). Der Preis würdigt den Beitrag des Teams bei der Entwicklung des virtuellen Maisfeldes in den simulierten Umgebungen. Diese Arbeit beinhaltete die Entwicklung eines Codes, der genau beschreibt, wie eine Maispflanze und andere Komponenten aussehen, und reale Effekte wie Wind- und Sonnenschatten erzeugt, damit landwirtschaftliche Feldszenarien möglichst realistisch umgesetzt werden konnten.
In diesem Jahr nahmen auch zwei Teams technisch begabter Schüler aus Hamburg und Überlingen teil: Das Camper Robotic-Team präsentierte einen Segway-ähnlichen -Roboter namens Field Balancer, das Carbonite-Team überzeugte in verschiedenen Aufgaben und belegte den dritten Gesamtplatz.
Erfolgreiche Premiere der virtuellen Veranstaltung
Wir sind mit dem Ablauf und dem Ergebnis des virtuellen Field Robot Event und dem Feedback der Studenten und Zuschauer sehr zufrieden. Bei der Konstruktion eines Roboters wird ein Simulationsmodell mit Algorithmen entwickelt, lange bevor der Feldroboter in Hardware umgesetzt wird, beschreibt Prof. Hans W. Griepentrog, Leiter Fachgebiet für Verfahrenstechnik in der Pflanzenproduktion an der Universität Stuttgart-Hohenheim, die Herausforderungen des Wettbewerbs. Die Softwaresimulation ist daher ein fester Bestandteil der Feldroboterentwicklung. Die Herausforderung für die Studenten bestand darin, alle nötigen Algorithmen für einen funktionierenden Roboterbetrieb zu erstellen. Deshalb war dieses Event eine perfekte Übung, um herauszufinden, wozu ein System fähig ist, und um die eigenen Entwicklungen mit denen anderer Teams zu vergleichen. Das lieferte den Studenten einen beträchtlichen Erkenntnisgewinn für ihre weitere Arbeit, sagte Prof. Griepentrog.
Aufgrund der positiven Resonanz haben wir beschlossen, dass die ROS Gazebo-Simulationsumgebungen, die wir speziell für diese Veranstaltung erstellt haben, nach dem Wettbewerb weiterhin verfügbar bleiben, damit Studierende ihre zukünftigen Feldrobotersimulationen auf dieser Plattform testen können", so Prof. Griepentrog.



Zu diesem Artikel liegen noch keine Kommentare vor.
Artikel kommentierenSchreiben Sie den ersten Kommentar.